Can you introduce yourself in a few words?

Marcus HEWAT, I am Tech Lead at AVSimulation in the field of Vehicle Dynamics, Motion and Real-Time Systems. I was previously at SERA-CD, a company that developed the CALLAS vehicle dynamics model, which was bought by Sogeclair. I have been working in the simulator field for 20 years.
[Ed.: SERA-CD has since become SERA Ingénierie, a SOGECLAIR subsidiary and it’s software development department was integrated into AVS].
Can you explain the term VIL?
VIL is the acronym for Vehicle in the Loop. The idea is to introduce a complete vehicle in a virtual environment. This is the main difference with simulator and SIL use cases where only one element (software) of the vehicle is introduced. The vehicle tested in VIL is very close to a production vehicle, this enables reproducing all the interactions that take place between the mechanical and electronic components of the vehicle. Thus, we can precisely analyze the behavior and performance of all subsystems as they will be in final form.
What kinds of problems does VIL testing solve?
Testing a VIL means that we are testing a system that is fully integrated into a vehicle. Compared to other tests that are purely software, VIL allows us to really put ourselves in a situation where we encounter problems related to a final system. For example, the sensors which are real in this case are imperfect, they can generate noise. The inaccuracies that are linked to the simplification of mathematical models are removed and the effects linked to the interaction of the systems between them are reproduced.
What are the alternatives to VIL testing?
The first alternative to VIL tests is to perform full-scale tests with potentially decoy vehicles and pedestrians. It is also possible to do upstream tests with HIL (Hardware in the Loop) or SIL (Software in the Loop).
HIL (Hardware In the Loop)
SIL (Software In the Loop)
What are the advantages compared to a classic track test?
Compared to a classic track test, where we use decoy vehicles or pedestrians, what must be noted is that a decoy, such as an inflatable car, does not necessarily have the same signature on a radar or the same visual appearance as a real vehicle. Also, when the system does not work or when we are at the limit, we can still collide and damage the vehicle on the test track. VIL allows us to avoid this kind of incident. In addition, many things cannot be tested on a track. Indeed, we cannot make a decoy car move at 130km for example, whereas a virtual car can drive at this speed. We can also do simulations in heavy traffic conditions.
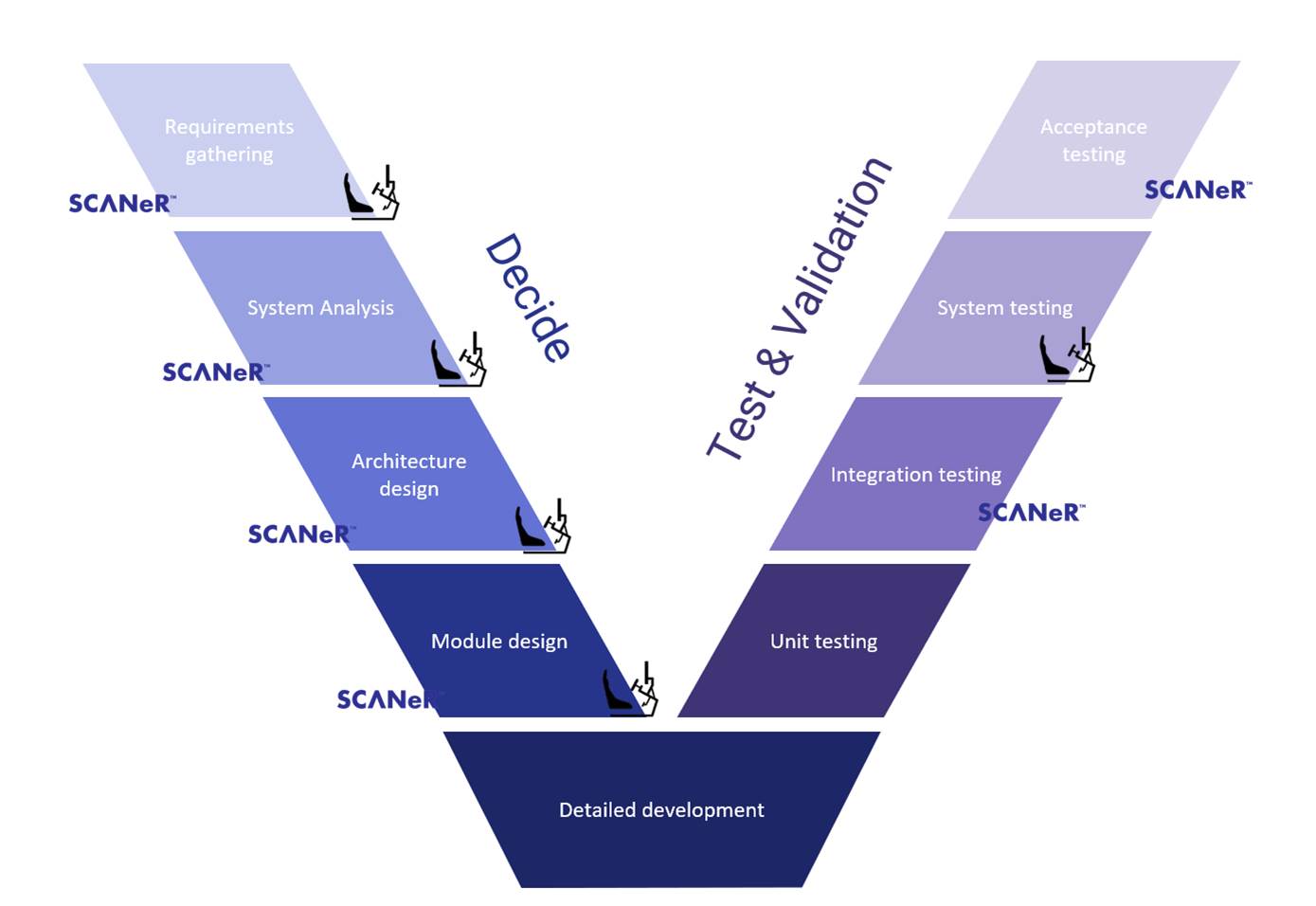
What is its place and role in the V-cycle?
The VIL comes at the end of the cycle. It occurs at the end of the development cycle to complement or in place of the track tests. At this stage, all the design and development tests as well as the hardware tests have been done. We are therefore on an almost finished product.
What makes SCANeR a very good tool for the VIL?
The strong point of SCANeR is to provide a rich virtual environment, representative of what happens in reality. This includes road networks, surrounding traffic, pedestrians, sensors and the scripting that allows events to be triggered. These will allow us to bring all the power of these tools in a case where we use a real vehicle, very close to the production, to ensure that it works as intended.
As SCANeR is used in the upstream phases of design, we can also reuse data, scenarios and models from previous simulations.
Static VIL / Dynamic VIL, what is the difference and the use cases?
Indeed, there are two types of VIL; static and dynamic. They have in common the use of a complete car and the development of ADAS. This means that we can test the vehicles in situations that would be difficult to reproduce and/or dangerous. For example, we can simulate the detection of a pedestrian or a car.
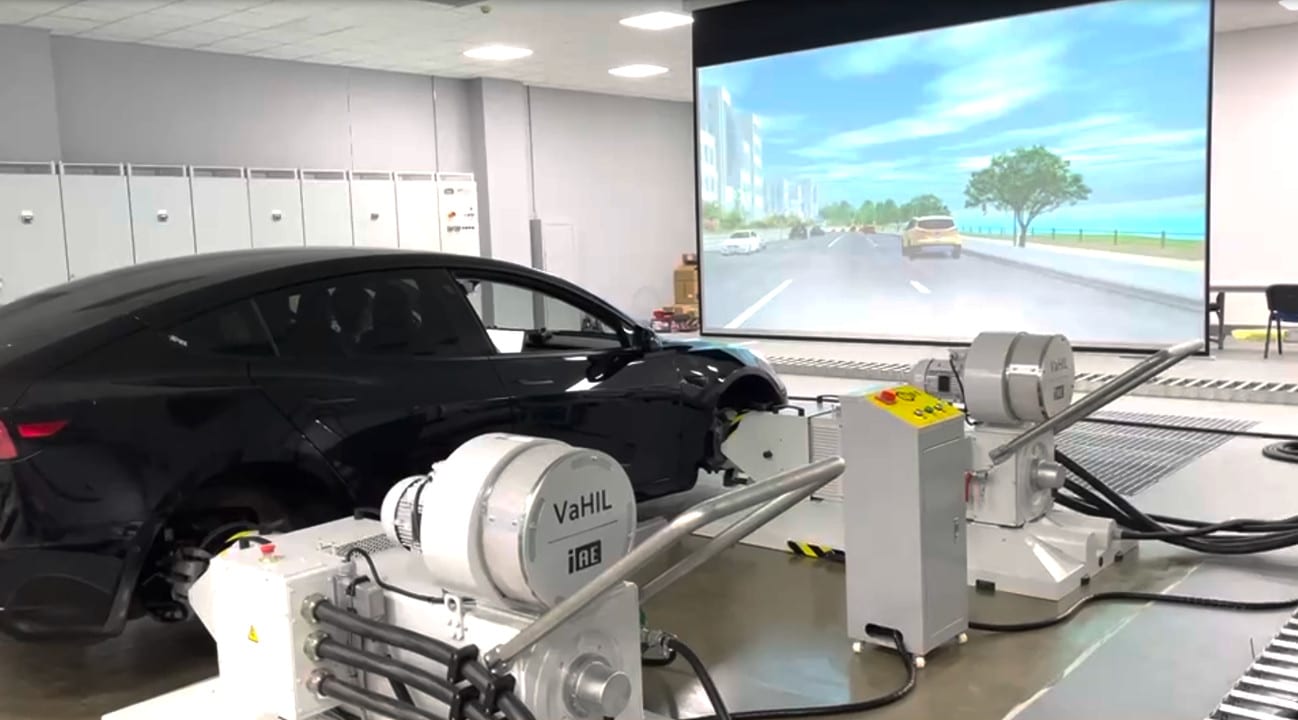
The static VIL represents a car placed on a test bench* in order to make the vehicle run without actually moving on the road. Static VIL enables testing the transmission, pollution, energy management and transition from electric to ICE. The powertrain is real, however, everything related to the chassis behavior remains simulated in software and the environment is entirely virtual.
*A VIL bench resembles a power bench (which measures the power of the vehicle) such as a Dynojet bench.
Use case:
With a static VIL, as the car is simply on a bench, it is possible to make synthetic simulations such as acceleration, braking, performance, consumption over time, etc. As the wheels turn at independent speeds, it is also possible to make cornering tests. It is also possible to do complex tests such as urban driving.
A dynamic VIL operates on a test track so it is a form of track testing as well. The difference is that virtual elements can be included such as making the scene more complete by simulating buildings, pedestrians, vehicles, etc. It is therefore augmented reality. This augmented reality can be perceived by both the subject/driver of the vehicle and the (virtual) sensors.

A word to finish up?
During my session “Presentation of products and achievements around VIL test benches” at SCANeR Days, one thing stood out:
What we can emphasize is that SCANeR is a very flexible software solution for automotive simulation. Throughout the entire development cycle, from early prototyping to VIL and all the intermediate steps (HIL and massive simulation on the Cloud), SCANeR enables using the same interfaces, scenarios, data and models from the beginning to the end of the development without having to create them again in a different tool at each step. This minimizes the work involved in each step.
To learn more, watch the SCANeR Days 2021 ViL testbed presentation video on our YouTube channel.